Ausgangspunkt
Ende 2016 habe ich mir meinen ersten 3D-Drucker gekauft. Einen China-Nachbau des Prusa I3, der wohl ursprünglich von der Firma CTC hergestellt wurde. Damals gab es diese Ding zum absoluten Schnäppchen-Preis von 180,-€.
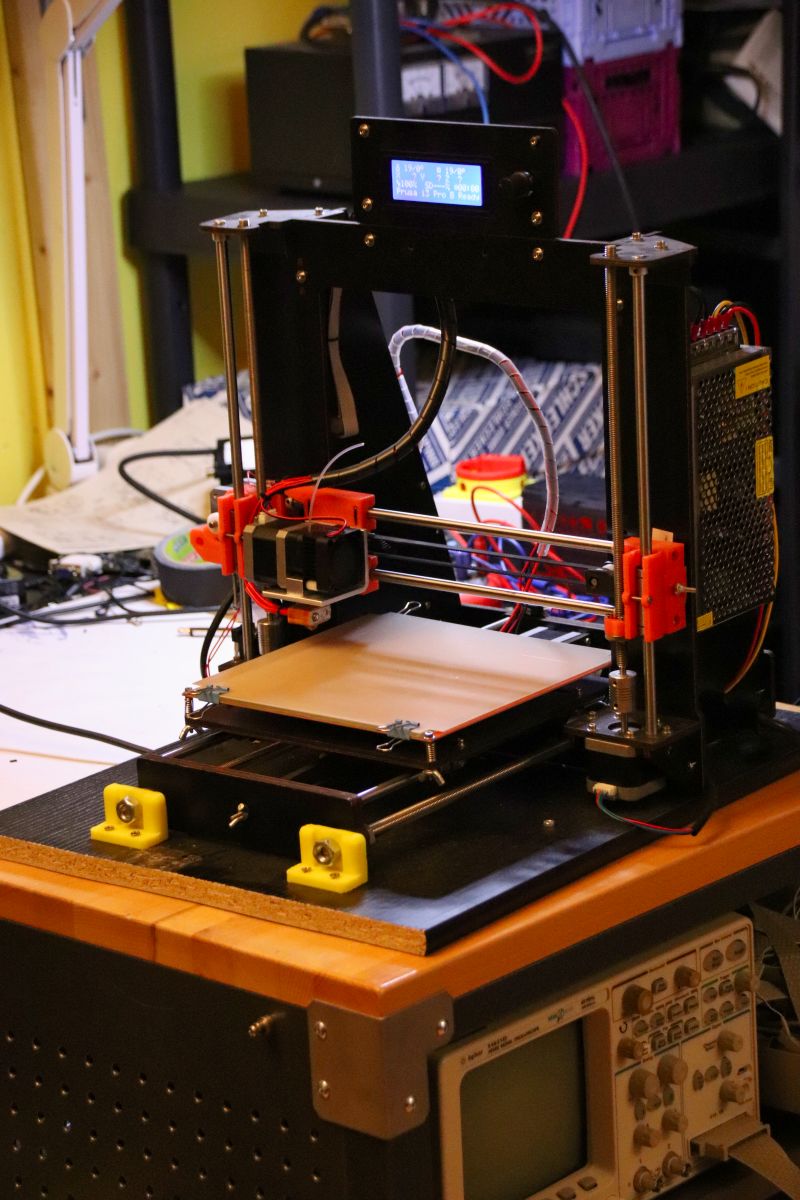
CTC prusa i3 Wood Edition
Nach dem ich die sehr einfache Mechanik, die zum größten Teil aus Sperrholz besteht, zusammengebaut und verkabelt hatte war ich überrascht, dass alles grundsätzlich auf Anhieb funktioniert hat! Die erste positiven Überraschung hielt allerdings nicht lang, denn mir fielen dann doch jede Menge Probleme auf… die ich dann nach und nach durch Modifikationen reduziert habe.
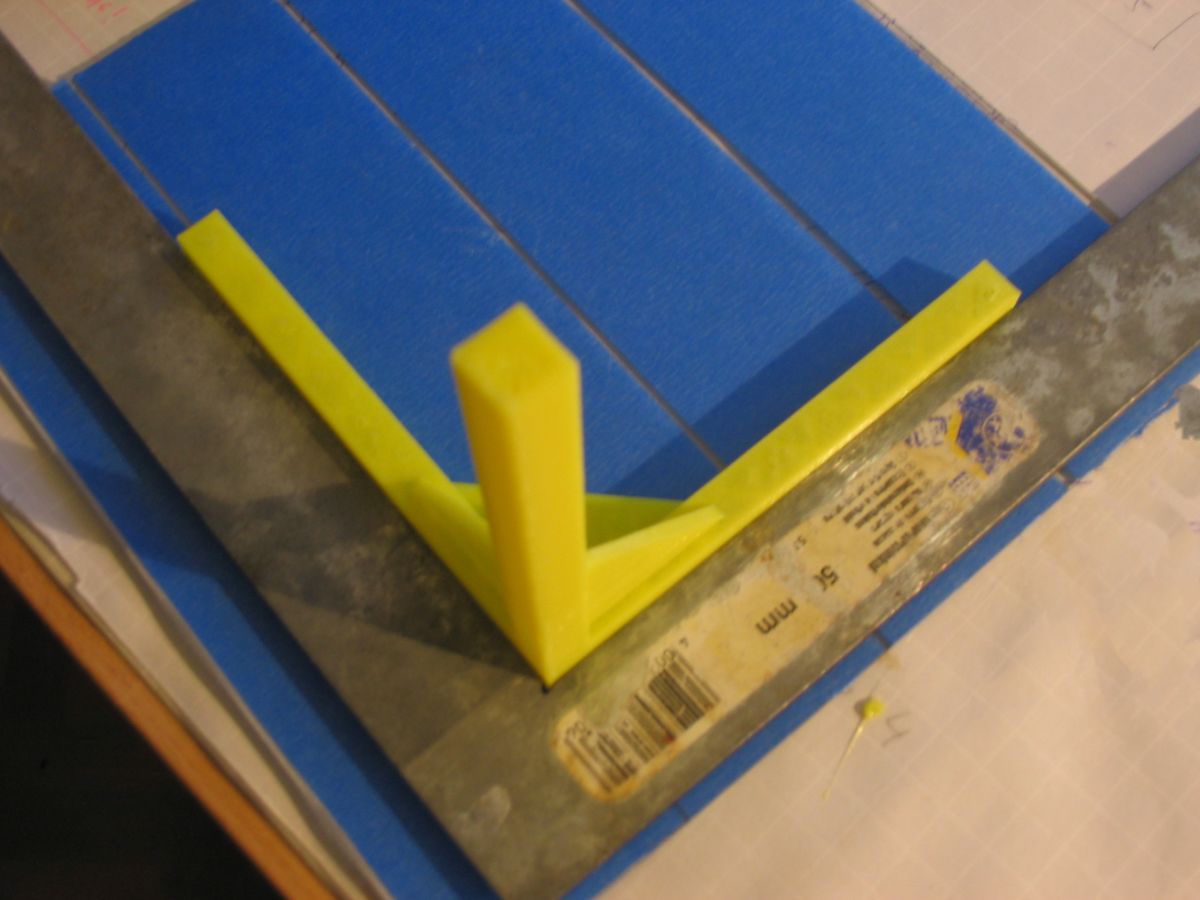
Die Sache mit dem rechten Winkel…
Bei den ersten größeren Drucken ist mir aufgefallen, dass die gedruckten Objekte garnicht rechtwinkelig waren, sondern immer Windschief. Und das bei fast jedem Druck ein bisschen unterschiedlich stark… Der Grund war, das der Sperrholzrahmen der XY-Achse des Druckers nicht steif genug war und sich durch die Bewegungen beim Drucken vorschob.
Der erste “Quickfix” für dieses Problem war den Rahmen des 3D-Druckers auf einer 18mm Spannplatte winkelig auszurichten und mit Spannklemmen daran zu fixieren. Dann habe ich mir ein paar Halteelemente konstruiert, mit denen ich den Rahmen dauerhaft an der Spannplatte befestigen kann. Diese habe ich dann mit dem Quickfix-Setup ausgedruckt und dann am Rahmen befestigt.
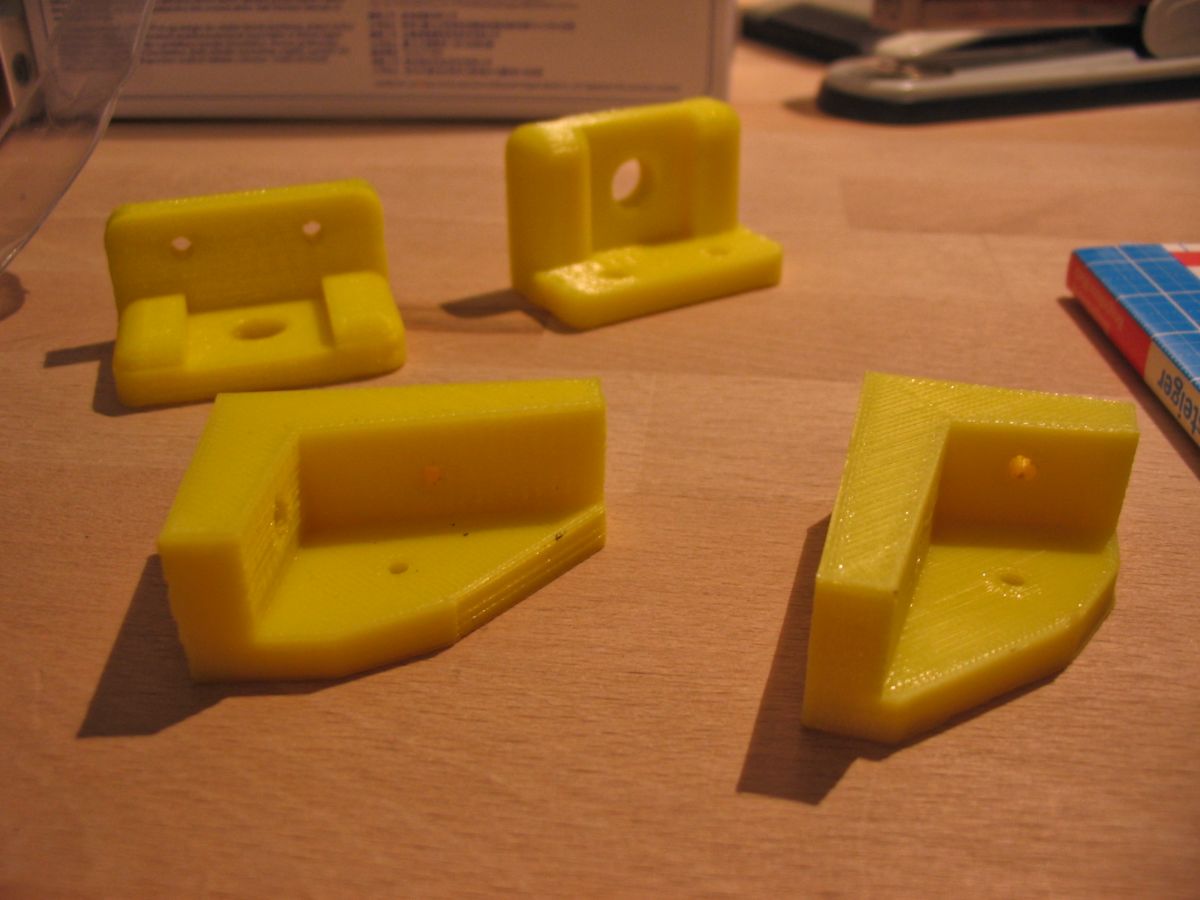
Halteelemente
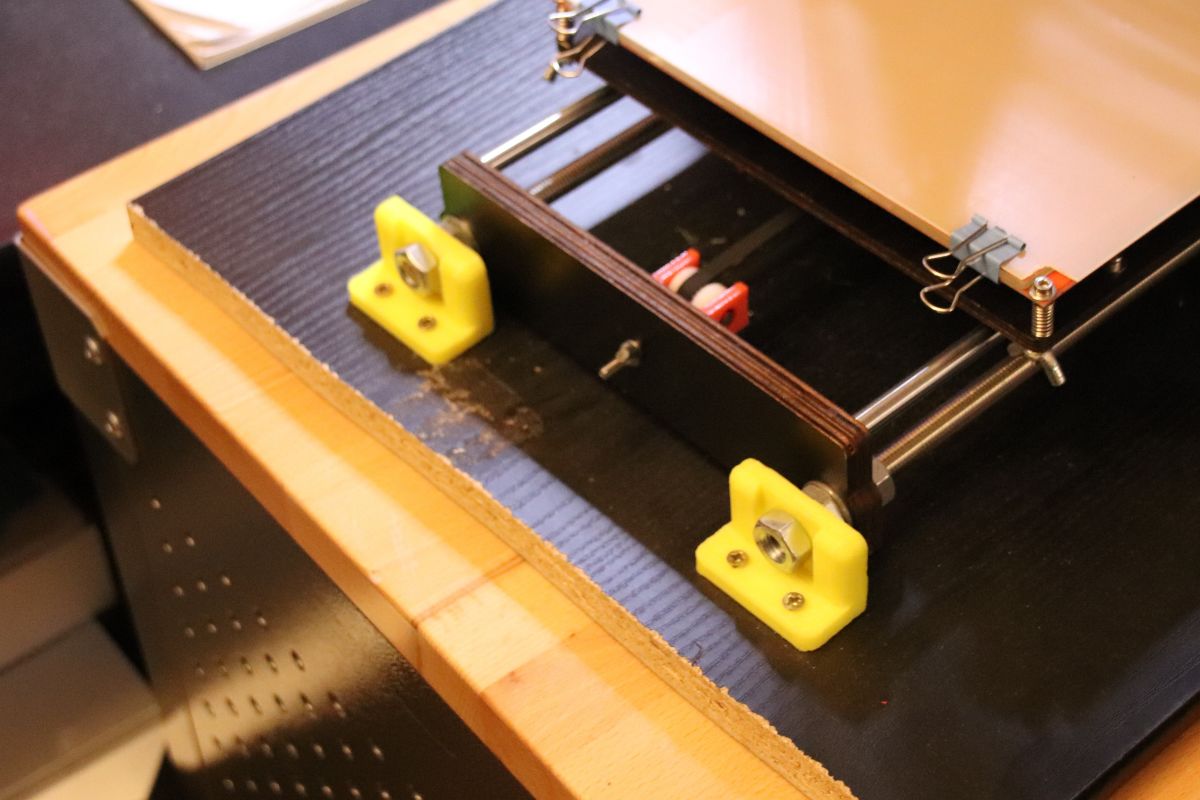
Halteelemente vorne
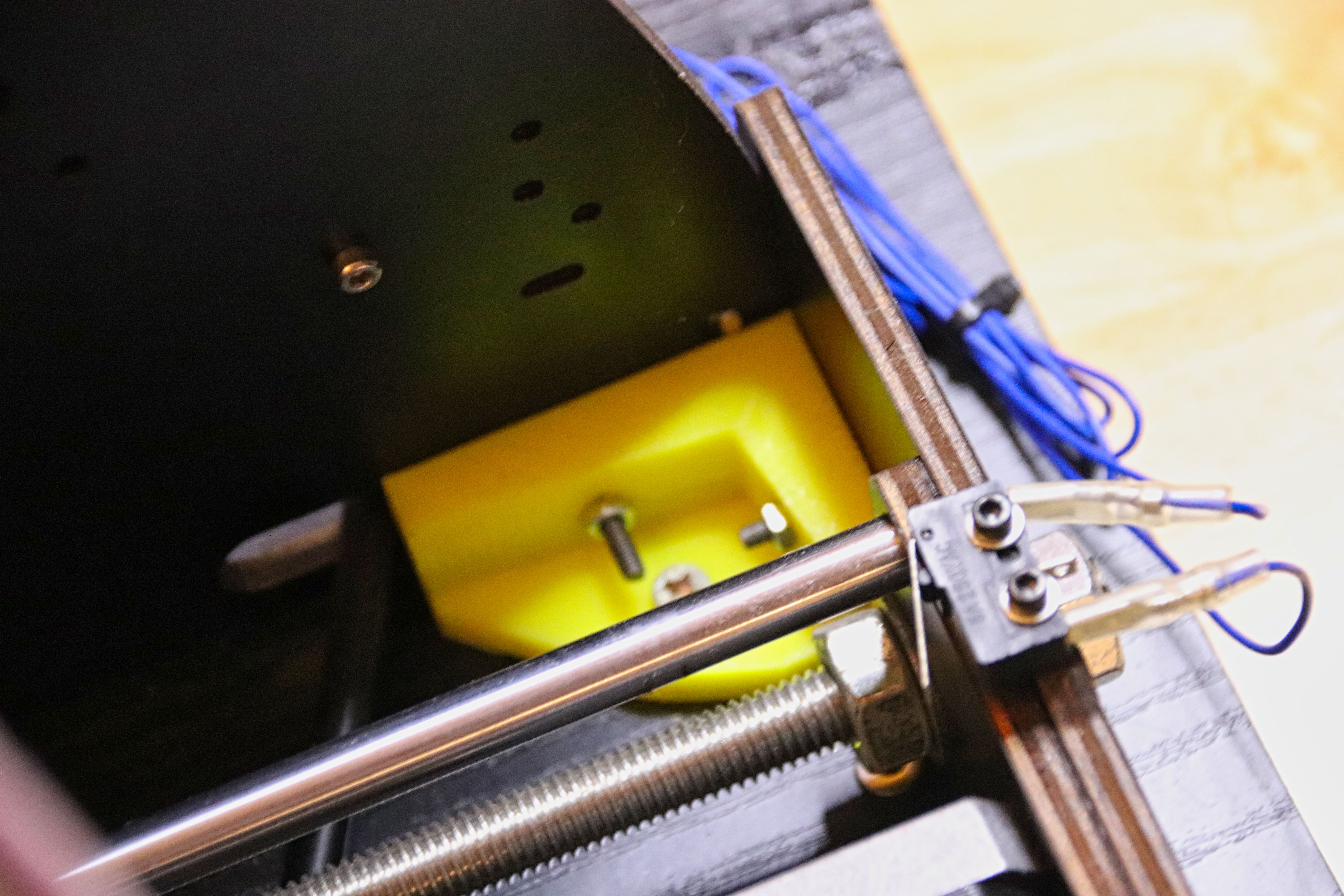
Halteelement hinten
Perfekt ausgerichtet!
Probleme mit der Z-Achse
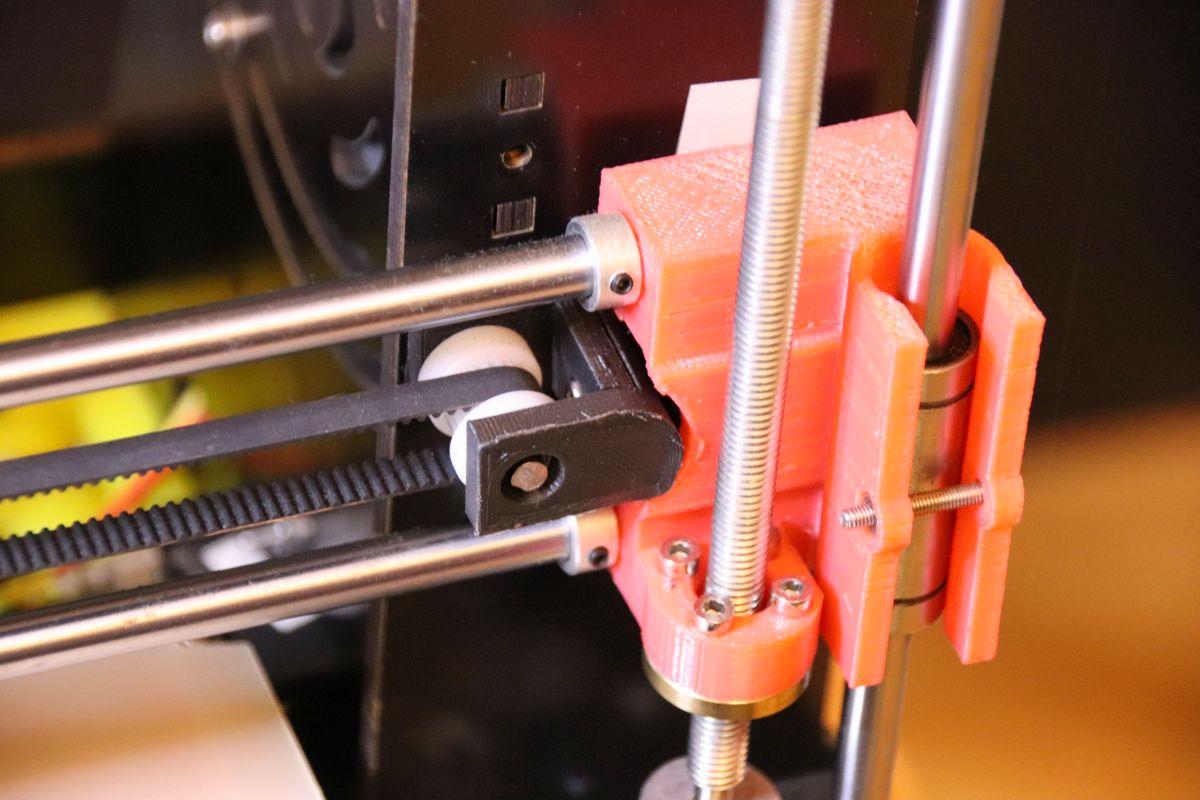
Ein weiteres mechanisches Problem waren die Z-Achsen, die nicht richtig rund liefen. Bei dem Bausatz war die Verbindung der Z-Achse mit den Schrittmotoren einfach durch das Aufstecken eines stramm sitzenden Gummischlauch gelöst. D.h. die Z-Achse hatte keinerlei Bewegungsfreiheit in die xy-Richtung, um das Achsspiel auszugleichen. Aus dem Grund habe ich den Gummischlauch auf beiden Seiten durch Wellenkupplungen ersetzt.
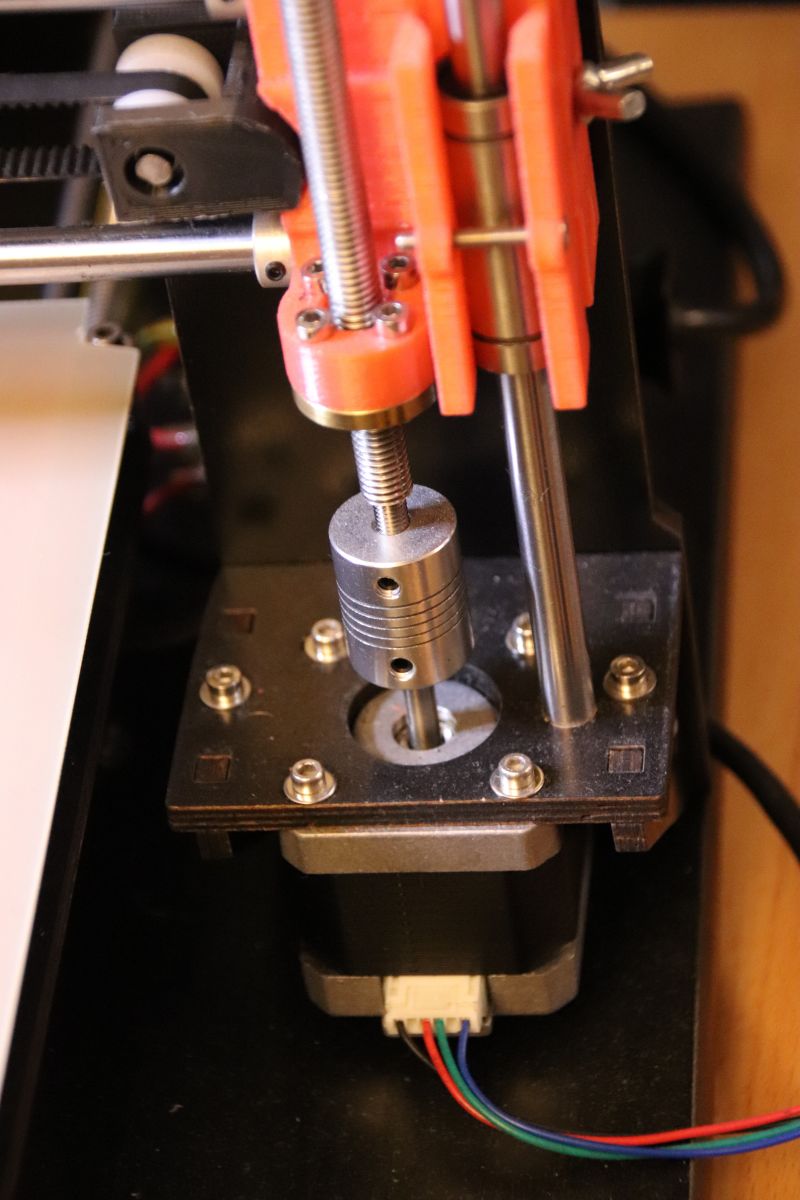
Wellenkupplung an z-Achse
Größenskalierung passt nicht
Aus irgendeinem Grund war die Größenskalierung der gedrucken Objekte falsch! Für die Umrechnung der G-Codes in die Bewegungsdaten war die Firmware des Druckers zuständig und dort waren ab Werk scheinbar nicht die korrekten Umrechnungsparameter eingetragen worden. Leider gab es bei der Firmware des Kontrollerboards nicht die Möglichkeit diese Parameter zu korrigieren.
Ein erster Workarround dafür war erstmal die Skalierung der Objekte im Slicer (Cura) entsprechend anzupassen, dass sie in der Realität dann die richtige Größe haben. Das hat auch erstmal ganz gut funktioniert… aber richtig zufriedenstellend ist das nicht.
Die eigentliche Lösung lag in der Firmware des Druckers “vergraben”. Der 3D-Drucker hat ein Geeetech GT2560 Rev. A Mainboard, dass die gesamte Steuerung des Druckers übernimmt. Darauf lief eine von Hersteller modifizierte Version der “Marlin”-Firmware, die auf einem ziemlich alten Stand war.
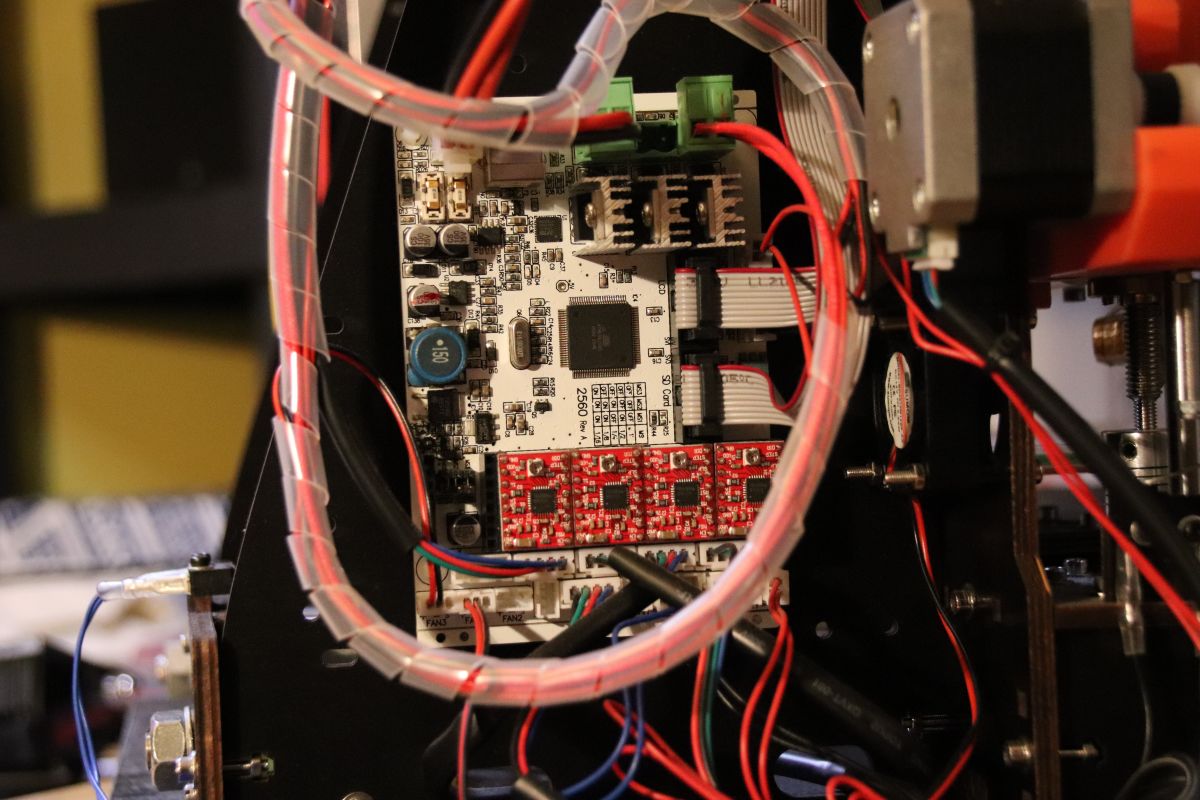
Controllerboard GT2560
Zu diesem Board gibt es zum Glück sehr viele Info’s u.a. auch vom Hersteller Geeetech. Außerdem wird dieses Board auch direkt von Marlin unterstüzt. Es reicht also bei den aktuellen Marklin-Sourcen das GT2560 auszuwählen, die Firmware zu bauen und dann auf das Board zu flashen.
Ich habe die Sourcen für Marlin 1.1.9 für das GT2560 gebaut und die haben nach dem Flashen problemlos mit dem Drucker funktioniert.
Das File “Marlin.ino.with_bootloader.mega.hex” enthält die Marlin-Firmware und den Arduino Bootloader. Diese Firmware-Version muss man flashen, wenn vorher eine Firmware ohne Bootloader installiert war. In diesem Fall muss man entweder ein anderes Arduino-Board oder einen Atmel ISP-Programmieradapter zum Flashen der Firmware einsetzen. Leider hat das Board keinen Standard-ISP Anschluß, aber alle Signale liegen an dem Steckern SV1 & SV3 an.
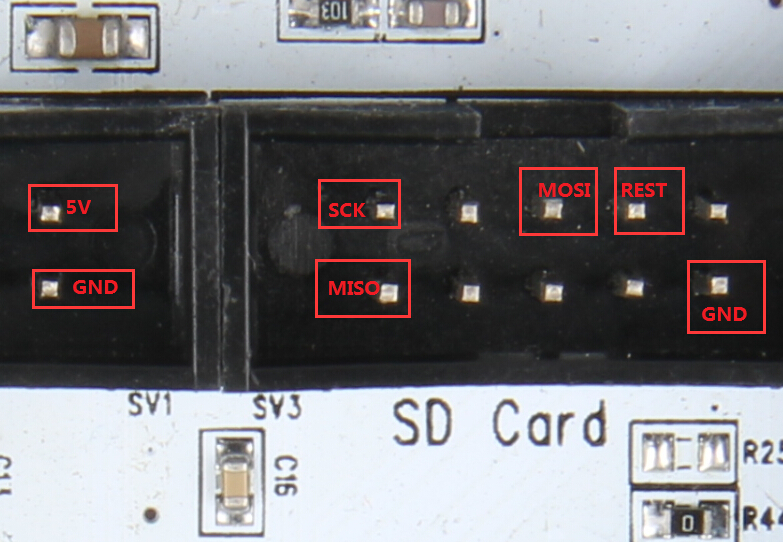
Programmierpins
Die Version “Marlin.ino.mega.hex” ist ohne Bootloader und kann z.B. direkt mit der Arduino-IDE geflasht werden.

Startmeldung!
Nach der Installation müssen die Konfigrationsparameter in Marlin angepasst werden und die XYZ-Achse kalibiert werden. Bei meinem Drucker haben die folgenden Parameter funktioniert:
| Richtung | Steps/mm |
|---|---|
| x | 80.34 |
| y | 80.34 |
| z | 2560.00 |
Damit waren auch die Skalierungsprobleme korrigiert!
Ergebnis
Insgesamt war der Drucker für den Preis zu dem Zeitpunkt ein guter Kauf. Der Drucker hat recht zuverlässig funktioniert und die Ergebnisse waren für mich gut genug. Z.B. die Gartenlampen sind auf diesem Drucker entstanden. Manche Probleme habe ich ihm aber nicht abgewöhnt, z.B. das das Netzteil den Radioempfang gestört hat sowie die Heizung in Betrieb war oder den Lärmpegel im Betrieb. Irgendwann ist dann auch einer der Spanner gebrochen, ich konnte aber im Notbetrieb noch einen Neuen drucken und dann war es auch wieder gut.
Ersatzspanner
Trotzdem bleibt der CTC Prusa i3 “Sperrholz”-Drucker wahrscheinlich eine ewige Baustelle. Deshalb habe ich mir Ende 2020 einen Creality Ender V3 Pro gekauft. Dieser Drucker hat eine Alumechanik, ist viel stabiler und hat vom ersten Tag mit einer Qualität gedruckt, die ich mit dem alten nur schwer erreicht habe.