Idee
Panik! 😱 Es ist kurz vor Ostern und die Eier sind noch nicht bemalt! Die Kinder arbeiten zwar künstlerisch wertvoll, sind aber viel zu langsam! Noch schlimmer sind nur noch meine Zeichenkünste und schnell bin ich dabei auch nicht! Die einzige sinnvolle Lösung besteht in der Automatisierung der Aufgabe! WIR BRAUCHEN EINEN EGGBOT und zwar schnell!
Also die >30 Jahre alten Fischertechnik-Kästen hervorgeholt, zwei Schrittmotoren & einen Servo mit einem Arduino verkabelt und noch ein bisschen Firmware darauf und fertig ist der EGGBOT! So der Plan…
Umsetzung
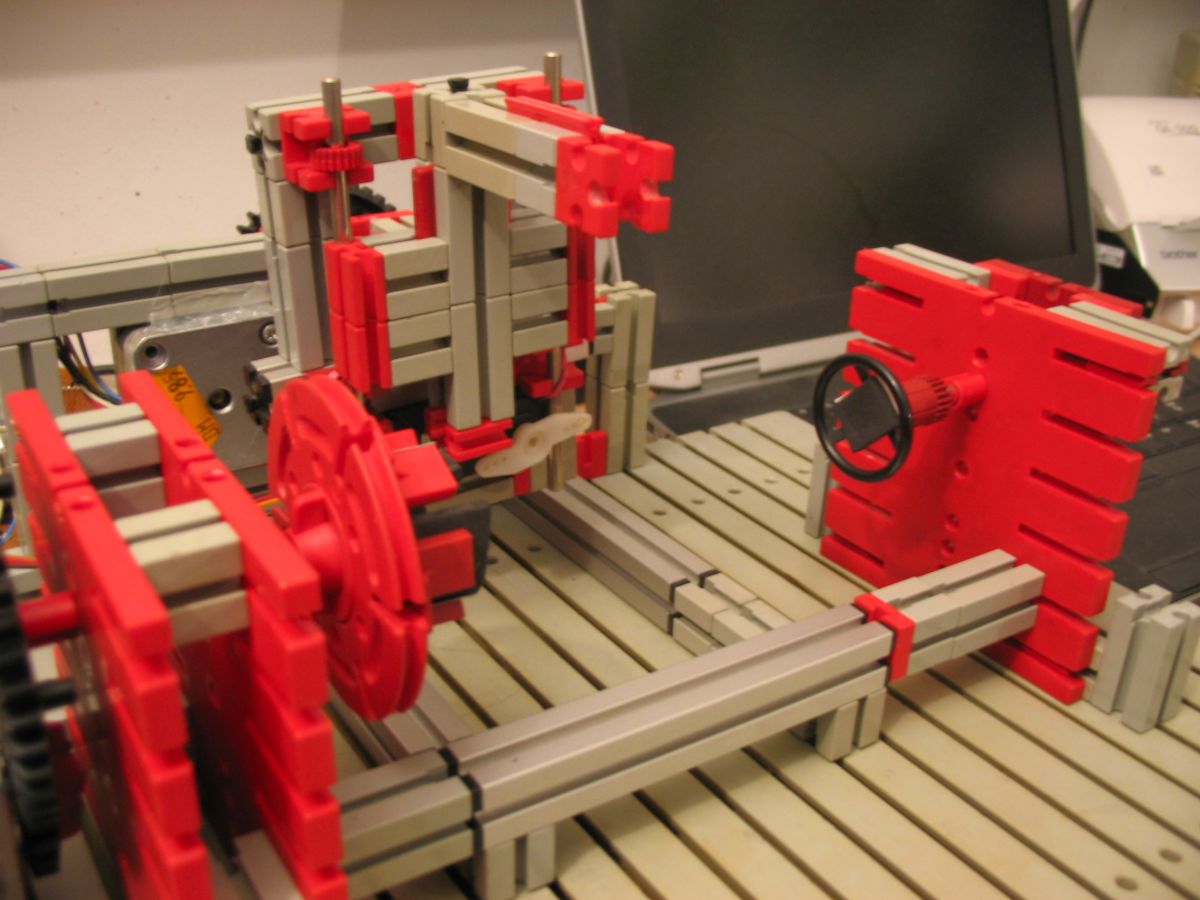
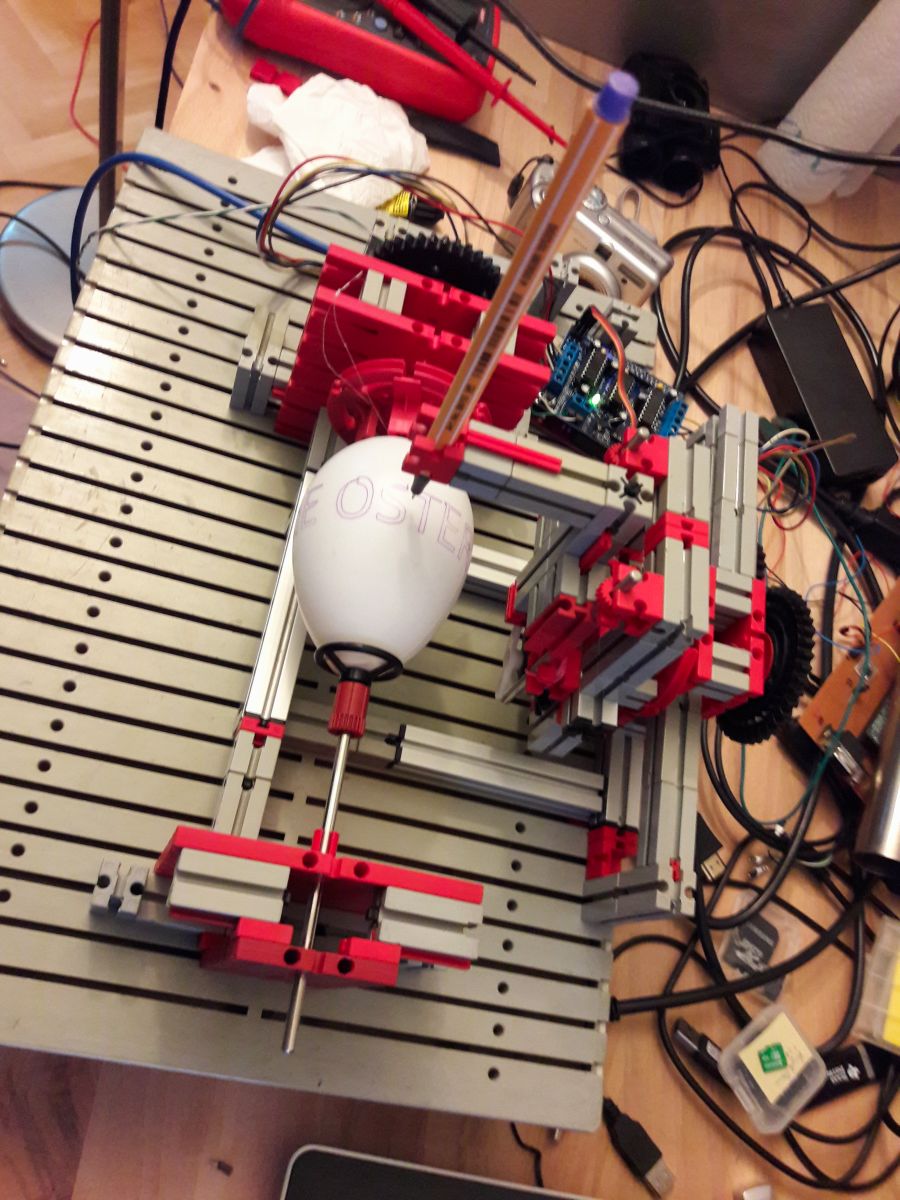
Die Originalidee für einen “Eggbot” haben vor einigen Jahren die Leute von den “Evil Mad Scientist Laboratories” hervorgebracht und sehr schön realisiert. Die Version hier wird mechanisch etwas unpräziser, aber das gleiche Funktionsprinzip nutzen. Ein Schrittmotor dreht das Ei im seine mittlere Achse. Senkrecht dazu dreht ein zweiter Schrittmotor einen Stifthalter. Der Stift an dem Stifthalter kann über einen Servomotor abgeschenkt werden, so das der Stift auf dem Ei malt.
Leider habe ich mit Fischertechnik aufgehört zu bauen, bevor es Fischertechnik Kits mit Schrittmotoren gabt. Aber ich hatte noch von einer Jugend forscht Arbeit 1991 zwei 100 Schritt Unipolar-Motoren. Der Servomotor stammt, glaube ich, auch noch aus dem gleichen Jahrtausend.

Bastelphase
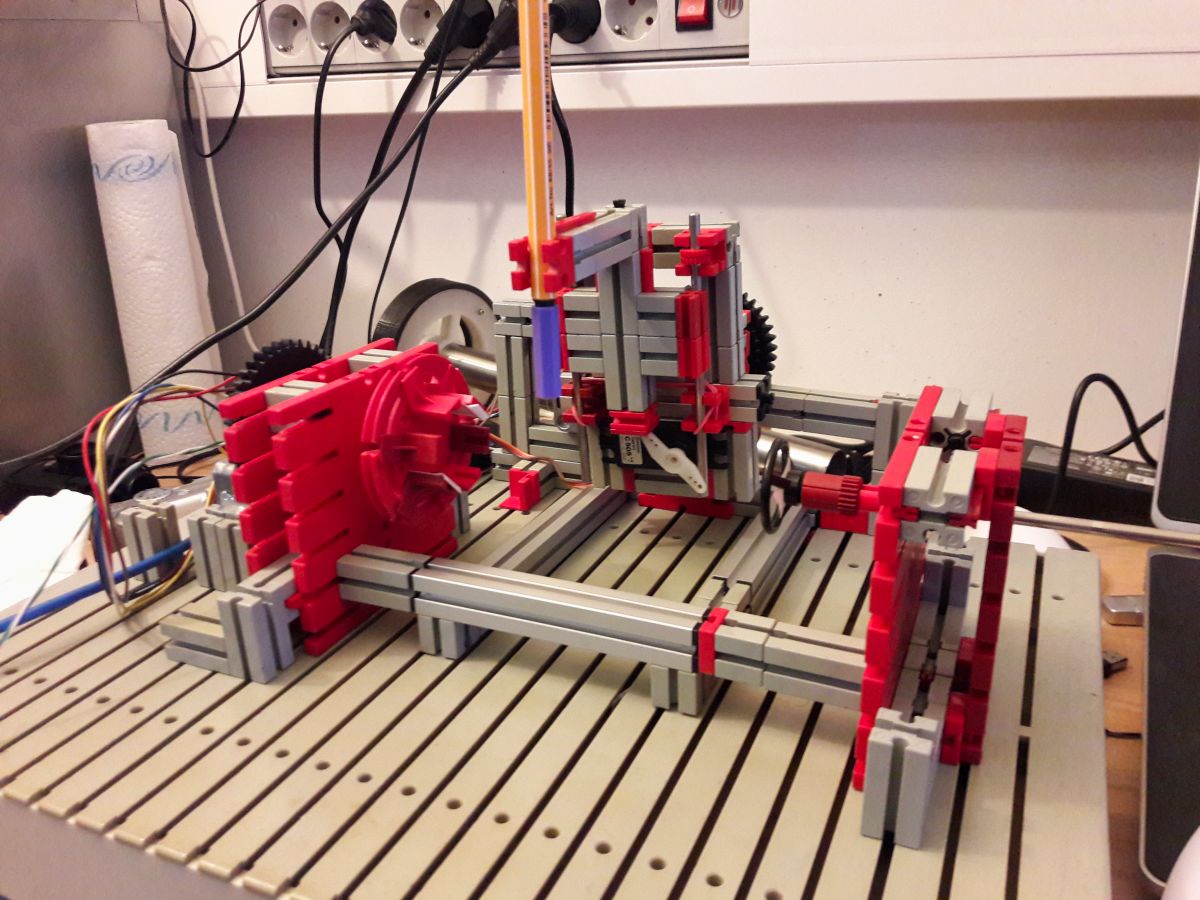
Finaler Eggbot
Stiftachse
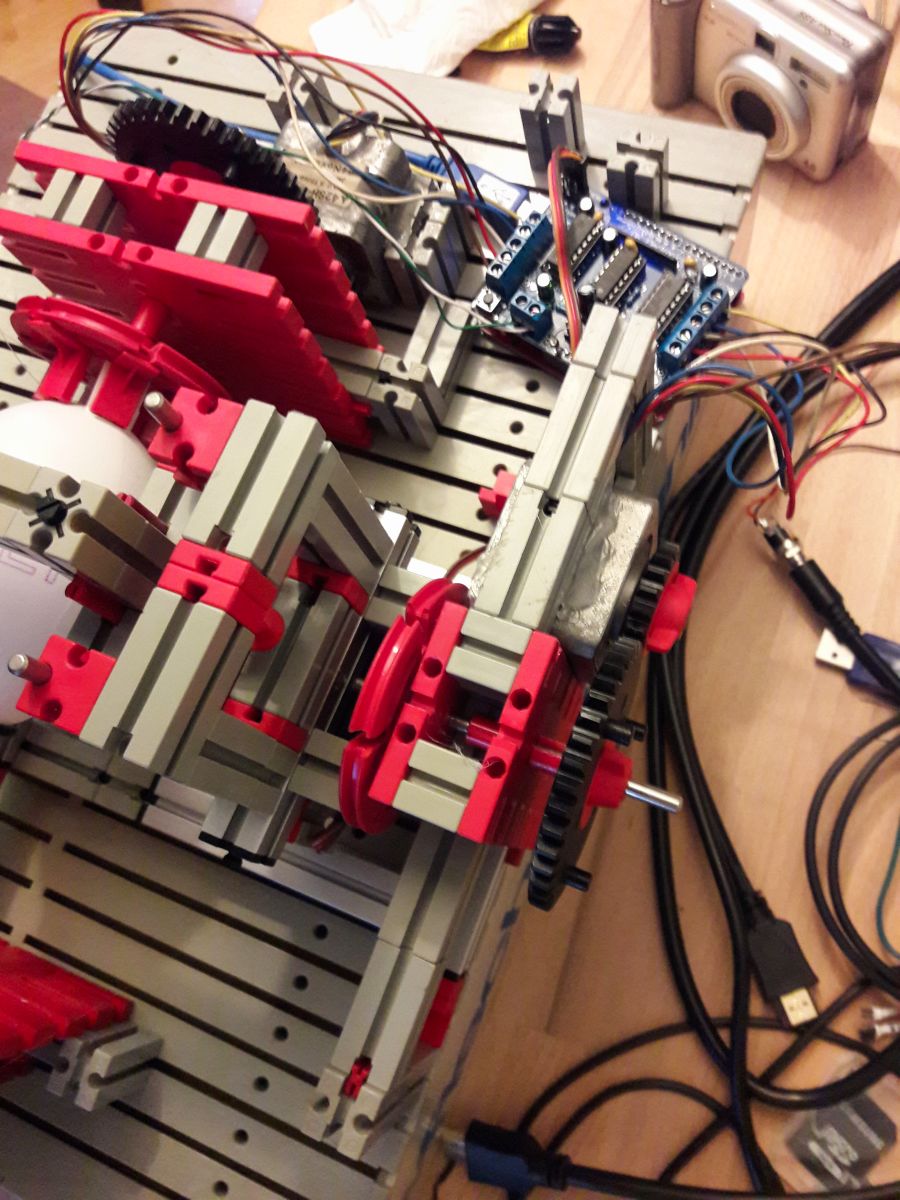
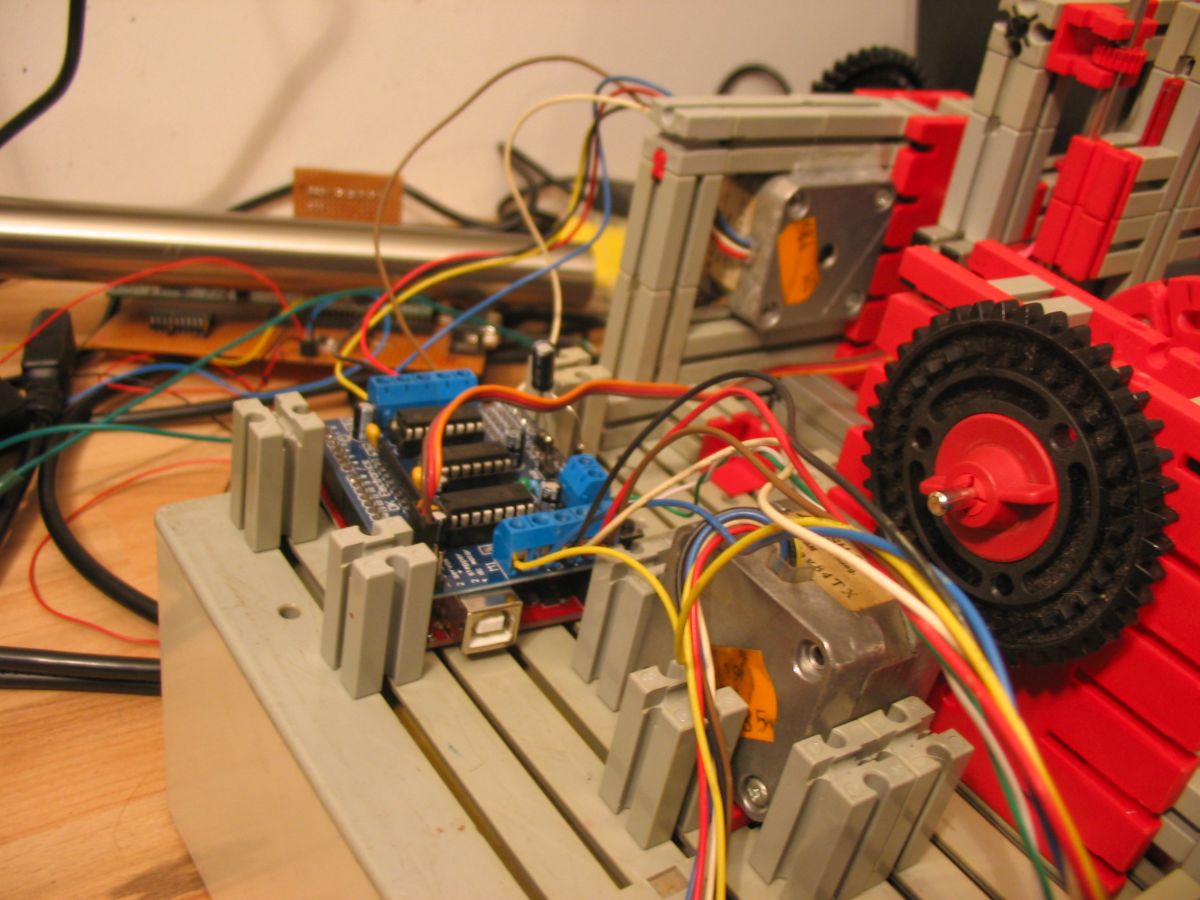
Die Schrittmotoren besitzen eine 4mm Achse. Um dort die Fischertechnik Zahnräder darauf zu befestigen, müssten die Radnaben ein bisschen aufgebohrt werden. Danach wurden die Schrittmotoren mit ein bisschen Heißkleber am Fischertechnik befestigt.
Rotationsachse
Oben sieht man auch das Adafruit Arduino Motorshield mit L293D Treibern mit dem die Schrittmotoren angesteuert werden. Dieses Motorshield wird direkt auf einen Arduino Uno gesteckt und liefert bis zu 600mA pro Motorphase. Leider lassen sich Unipolar-Schrittmotoren nur im Vollschrittbetrieb ansteuern, d.h. die Auflösung mit der die Bewegung ausgeführt ist durch die Motoren begrenzt. Auf dem Shield ist auch ein PWM-Anschluß für die Ansteuerung des Servomotors vorhanden.
Zeichenraum
Der Stifthalter kann durch das Ruderhorn am Servomotor nach oben gedrückt werden. Als Rückholkraft wird ein Gummiband benutzt, das den Stifthalter wieder nach unten zieht. Dadurch ist auch ein (relativ) gleichmäßiger Andruck des Stifts auf dem Ei sichergestellt.
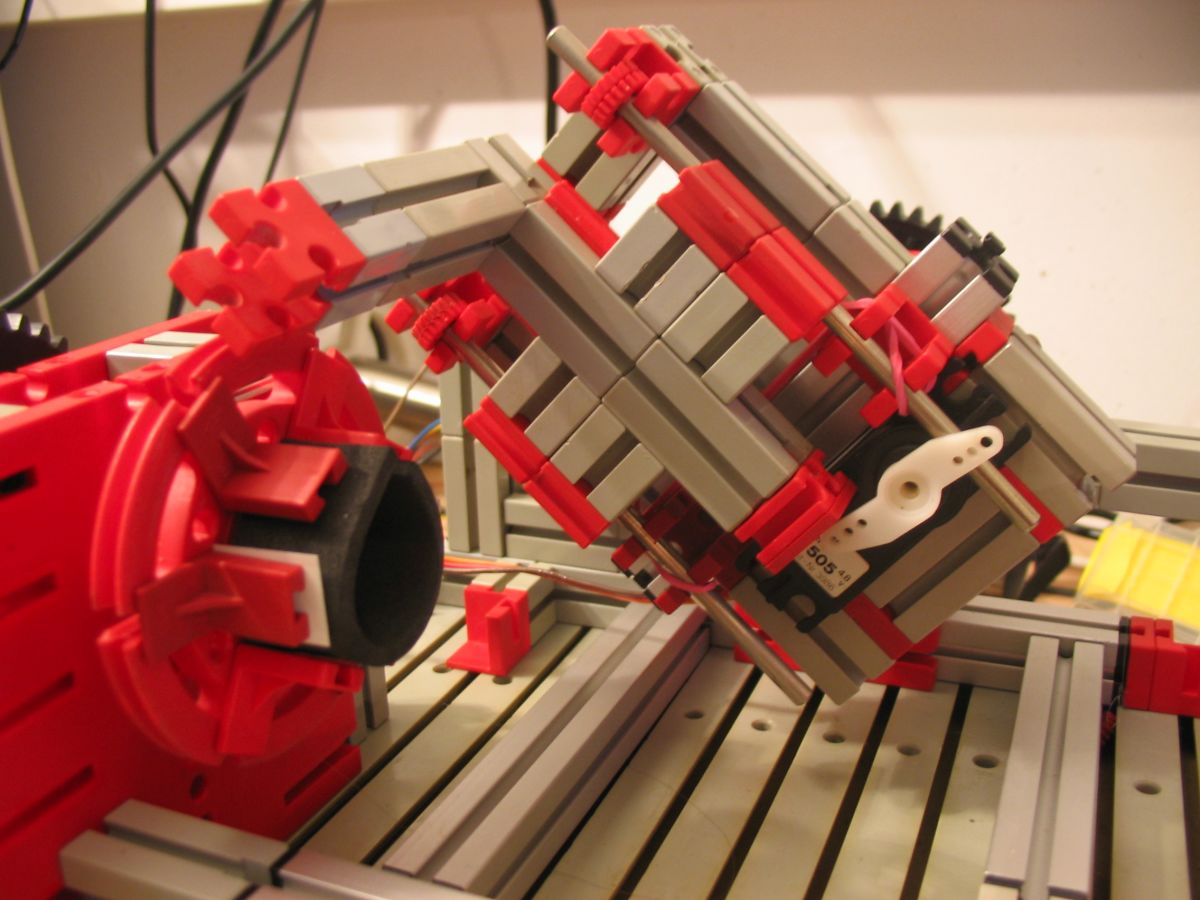
Stiftachse gekippt
Eggbot at work!
Die Firmware für den Eggbot habe ich auf Github eine Version gefunden, die das Adafruit Motorshield unterstützt. Diese Firmware musste ich allerdings noch vom Timing und der Auflösung ein bisschen an meinen Eggbot anpassen.
Für die Ansteurung vom PC setze ich das EggBot-Plugin für Inkscape ein, das man auch bei Github bekommen kann.
Fazit
Es macht Krach, es bewegt sich, es malt, also funktioniert es! Die Auflösung und Wiederholgenauigkeit ist ein bisschen gruselig, aber dafür dass der “Zeichenkopf” so schwer geworden ist, doch ganz gut!
Lustig, was man an zwei regnerischen Nachmittagen alles zusammenbasteln kann! Hat Spaß gemacht den ganzen alten Fischertechnik-Kram noch mal zu benutzen!