Idea
Panic! 😱 It’s almost Easter and the eggs haven’t been painted yet! The children do valuable artistic work, but they are much too slow! My drawing skills are even worse and I’m not fast at it either! The only solution is to automate the task! WE NEED AN EGGBOT and we need it fast!
So I took out the >30 year old Fischertechnik boxes, wired two stepper motors & a servo to an Arduino and added a bit of firmware and the EGGBOT is done! That’s the plan…
Implementation
The original idea for an “Eggbot” came up a few years ago with the people from the “Evil Mad Scientist Laboratories” and implemented it very nicely. The version here is mechanically a little less precise, but uses the same functional principle. A stepper motor rotates the egg on its central axis. Perpendicular to this, a second stepper motor rotates a pen holder. The pen on the holder can be dispensed via a servo motor so that the pen draws on the egg.
Unfortunately I stopped building with Fischertechnik before there were kits with stepper motors. But I had two 100 step unipolar motors from a youth research work in 1991. I believe the servomotor also dates from the same millennium…

Tinkering...
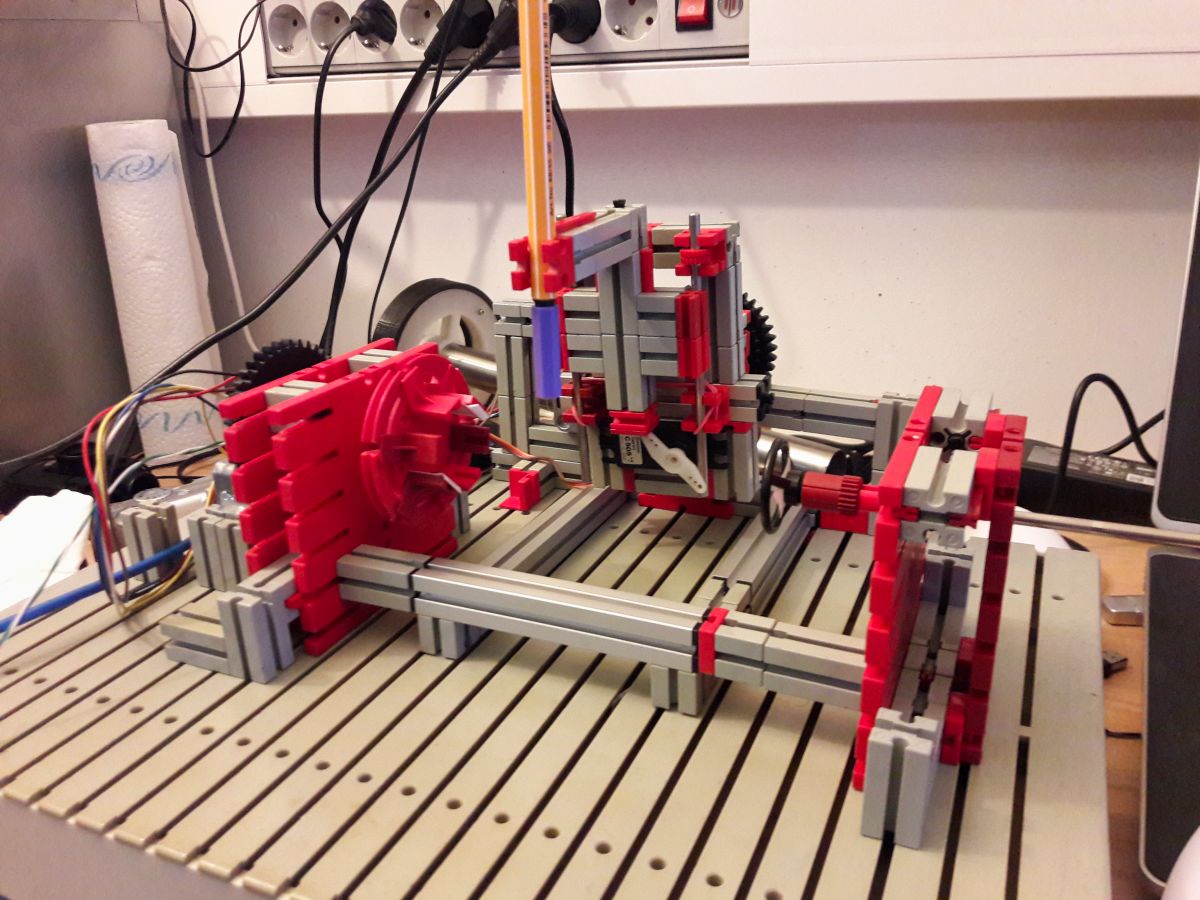
Final Eggbot
Pen axis
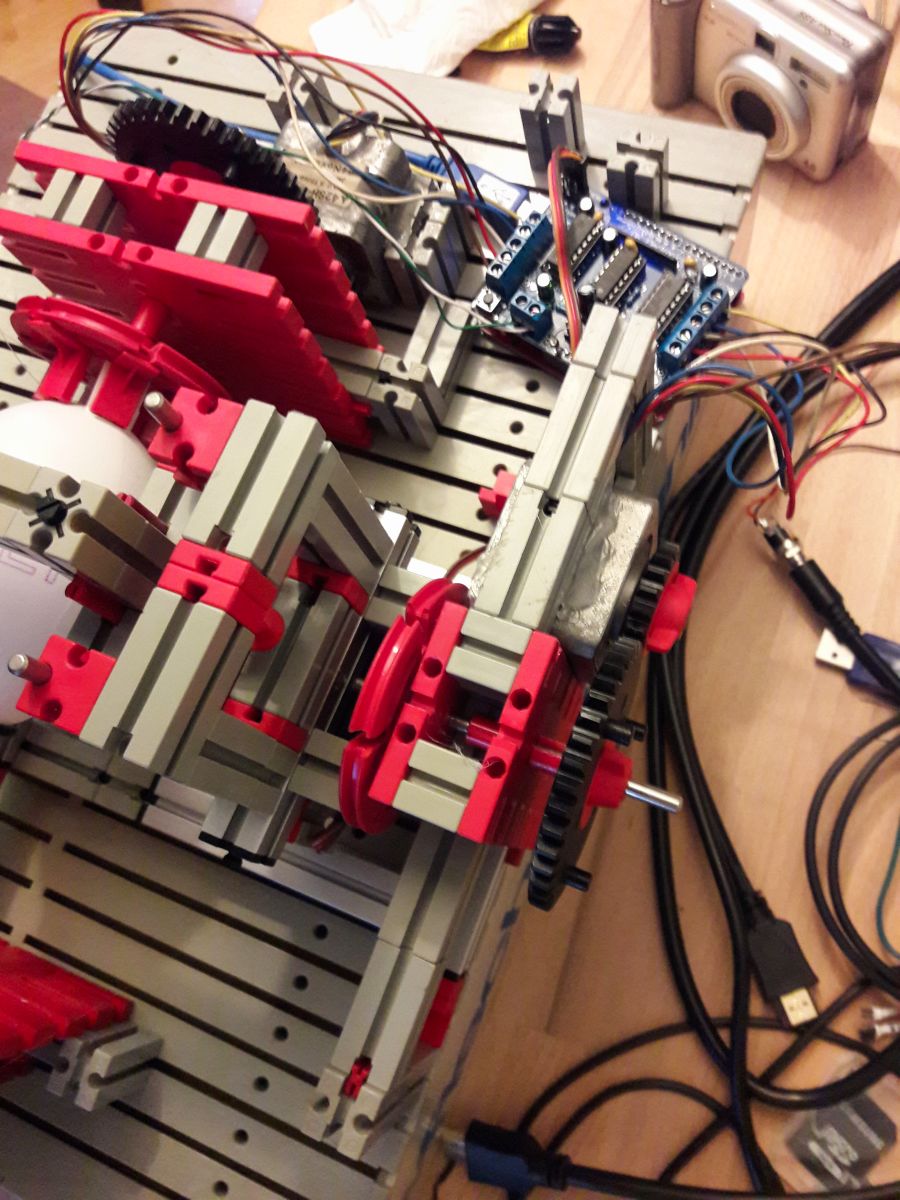
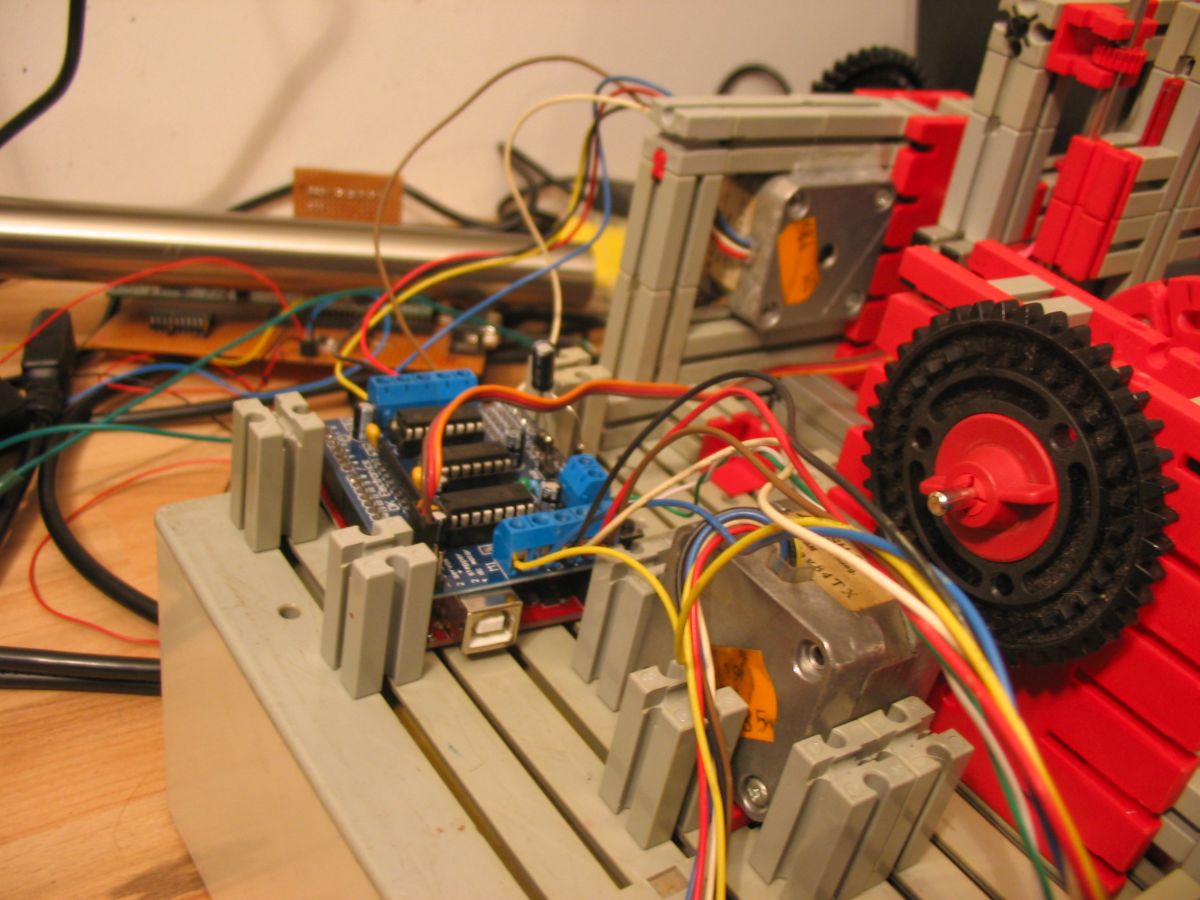
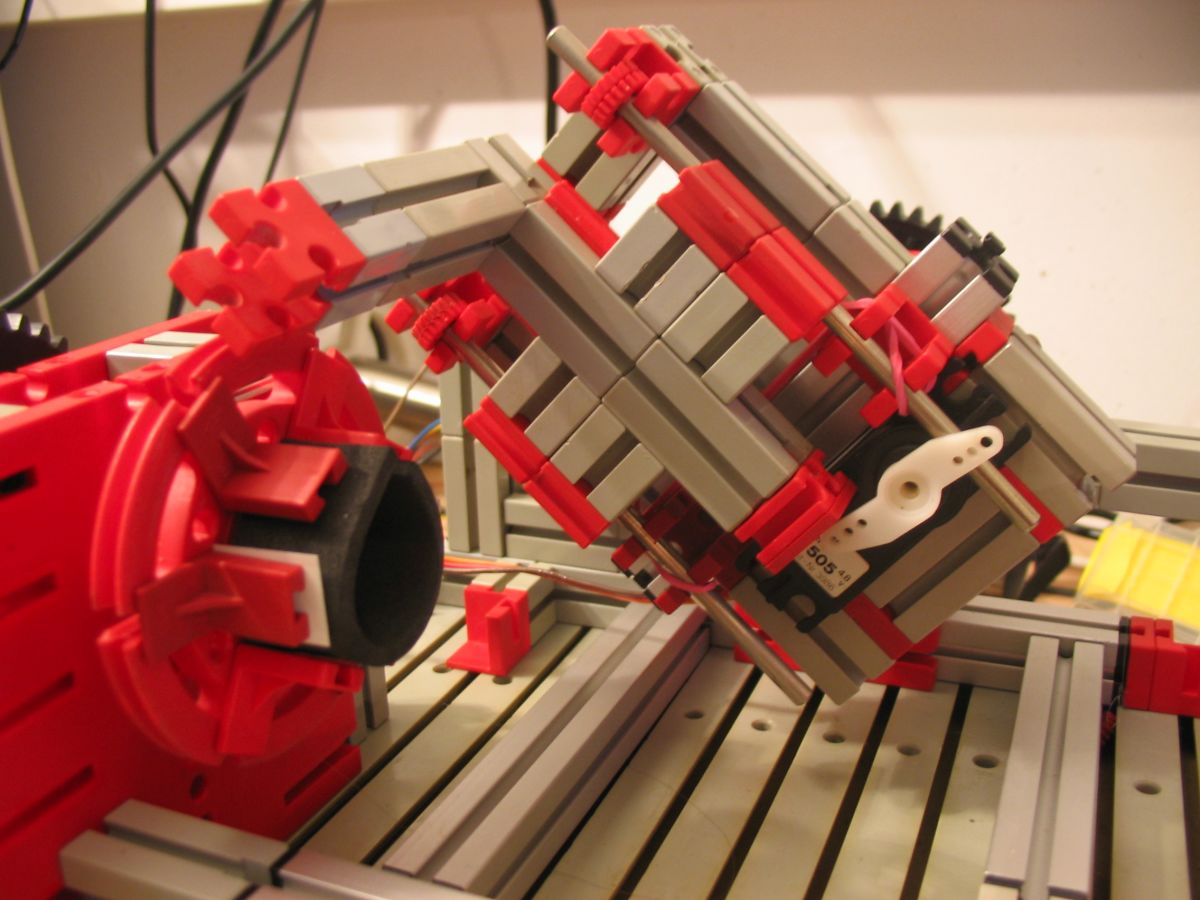
The stepper motors have a 4mm axis. In order to attach the Fischertechnik gears there, the wheel hubs would have to be drilled out a bit. Then the stepper motors were attached to the Fischertechnik with a bit of hot glue.
Rotation axis
Above you can also see the Adafruit [Arduino Motorshield with L293D drivers](https://www.awin1.com/cread.php?awinmid=14954&awinaffid=555328&ued=https%3A%2F%2Fwww.reichelt.de/arduino-motorsteuerung- l293d-ard-shd-l293d-p282640.html) with which the stepper motors are controlled. This Motorshield plugs directly onto an Arduino Uno and delivers up to 600mA per motor phase. Unfortunately, unipolar stepper motors can only be controlled in full step mode, so the resolution of the movement carried out is limited by the motors. There is also a PWM connection on the shield for controlling the servo motor.
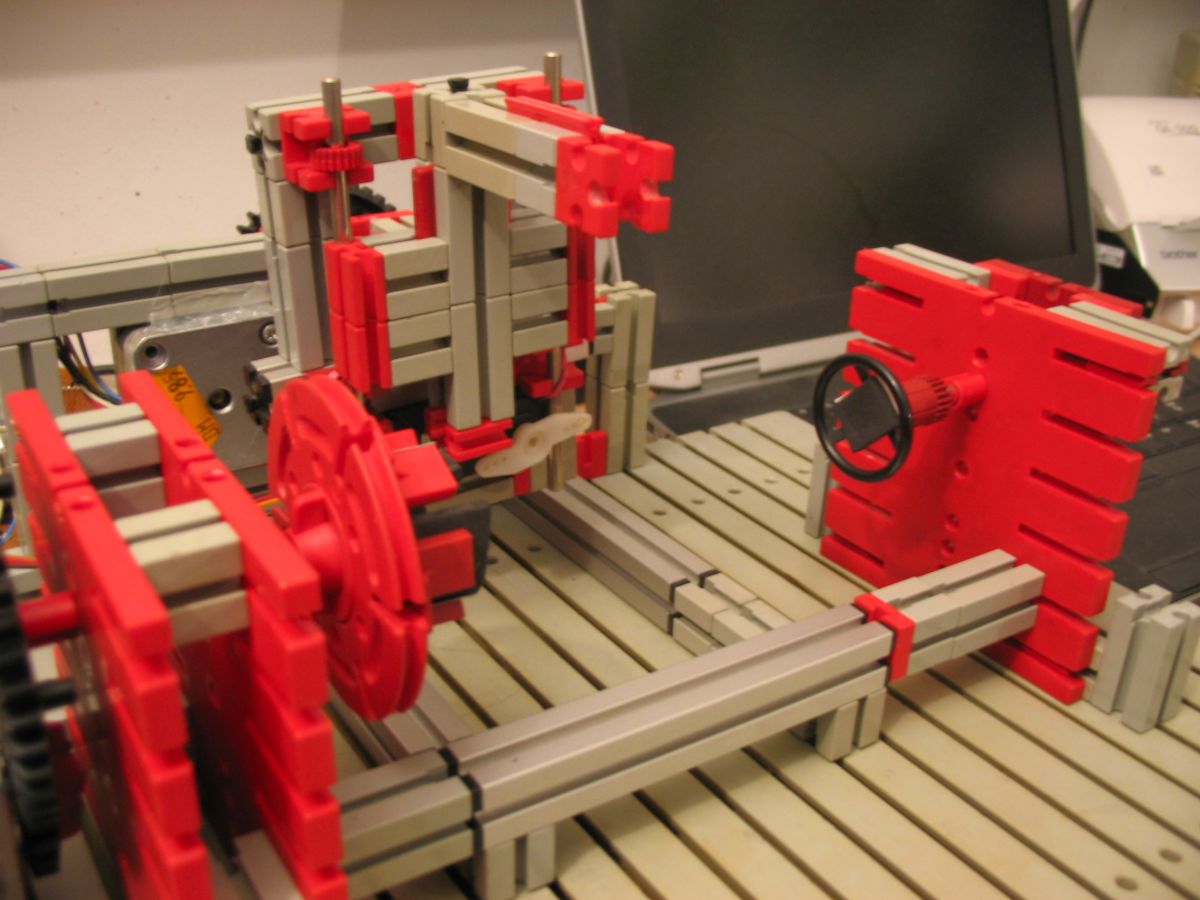
Drawing zone
The pen holder can be pushed up by the control horn on the servo motor. A rubber band is used as a return force, which pulls the pen holder down again. This also ensures a (relatively) even pressure of the pen on the egg.
Pen axis moved
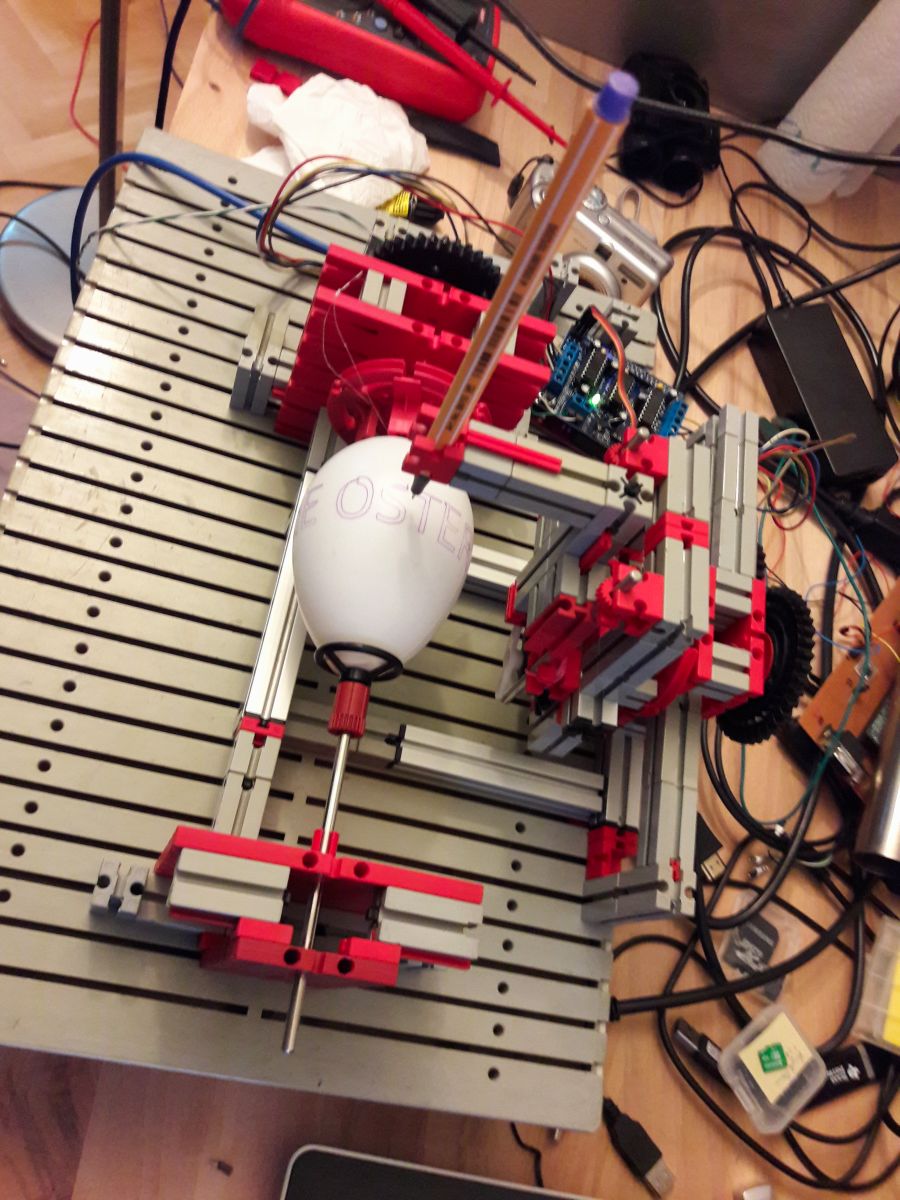
Eggbot at work!
I found a version of the firmware for the Eggbot on Github that supports the Adafruit Motorshield. However, I had to adapt this firmware a bit to my Eggbot in terms of timing and resolution.
For the control from the PC I use the EggBot-Plugin for Inkscape, which you can also get from Github.
Conclusion
It makes noise, it moves, it paints, so it works! The resolution and repeatability is a bit creepy, but considering that the “drawing head” has become so heavy, that’s pretty good!
Funny what you can tinker together in two rainy afternoons! Was fun to use all the old Fischertechnik stuff again!